Variational autoencoders.
A variational autoencoder (VAE) provides a probabilistic manner for describing an observation in latent space. Thus, rather than building an encoder which outputs a single value to describe each latent state attribute, we'll formulate our encoder to describe a probability distribution

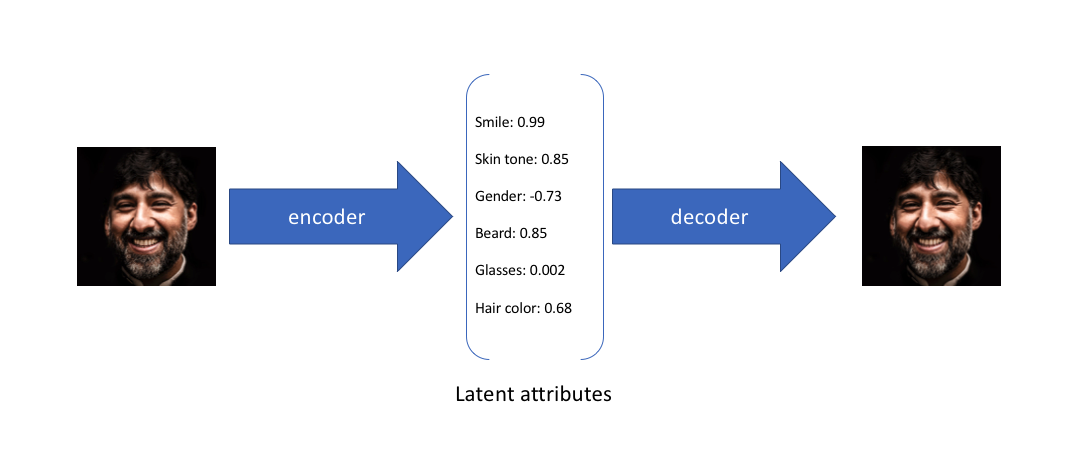
In my introductory post on autoencoders, I discussed various models (undercomplete, sparse, denoising, contractive) which take data as input and discover some latent state representation of that data. More specifically, our input data is converted into an encoding vector where each dimension represents some learned attribute about the data. The most important detail to grasp here is that our encoder network is outputting a single value for each encoding dimension. The decoder network then subsequently takes these values and attempts to recreate the original input.
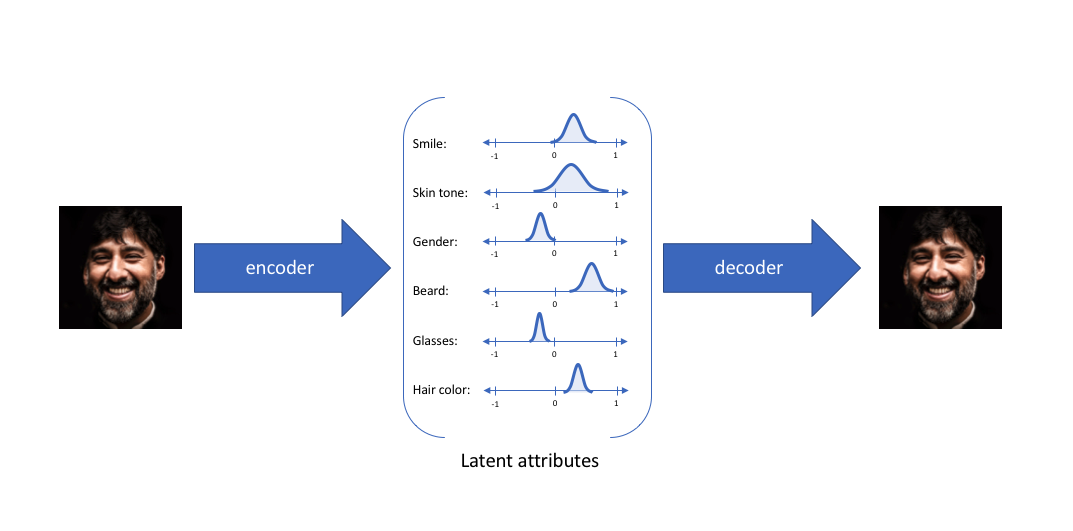
A variational autoencoder (VAE) provides a probabilistic manner for describing an observation in latent space. Thus, rather than building an encoder which outputs a single value to describe each latent state attribute, we'll formulate our encoder to describe a probability distribution for each latent attribute.
Intuition
To provide an example, let's suppose we've trained an autoencoder model on a large dataset of faces with a encoding dimension of 6. An ideal autoencoder will learn descriptive attributes of faces such as skin color, whether or not the person is wearing glasses, etc. in an attempt to describe an observation in some compressed representation.
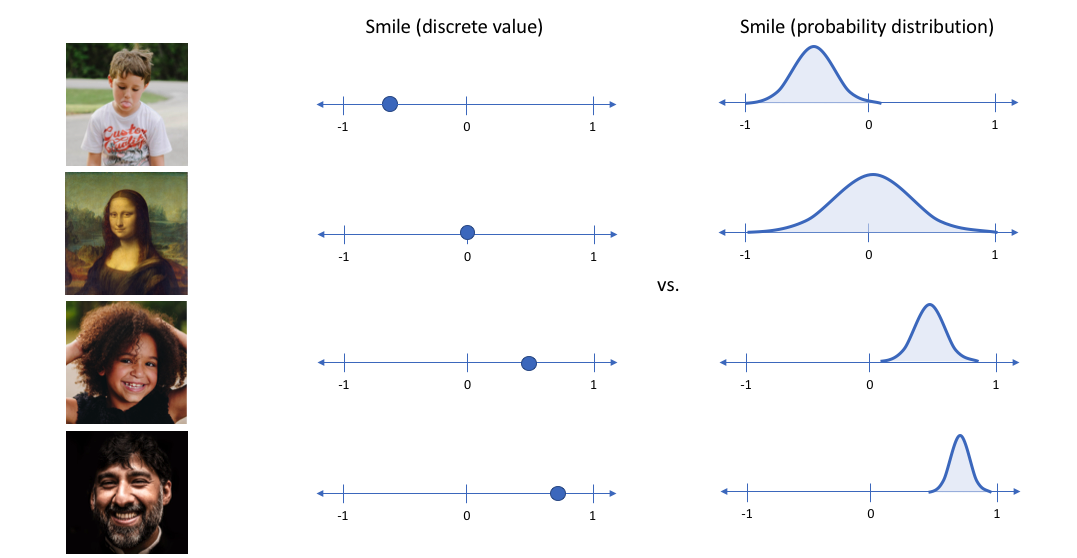
In the example above, we've described the input image in terms of its latent attributes using a single value to describe each attribute. However, we may prefer to represent each latent attribute as a range of possible values. For instance, what single value would you assign for the smile attribute if you feed in a photo of the Mona Lisa? Using a variational autoencoder, we can describe latent attributes in probabilistic terms.
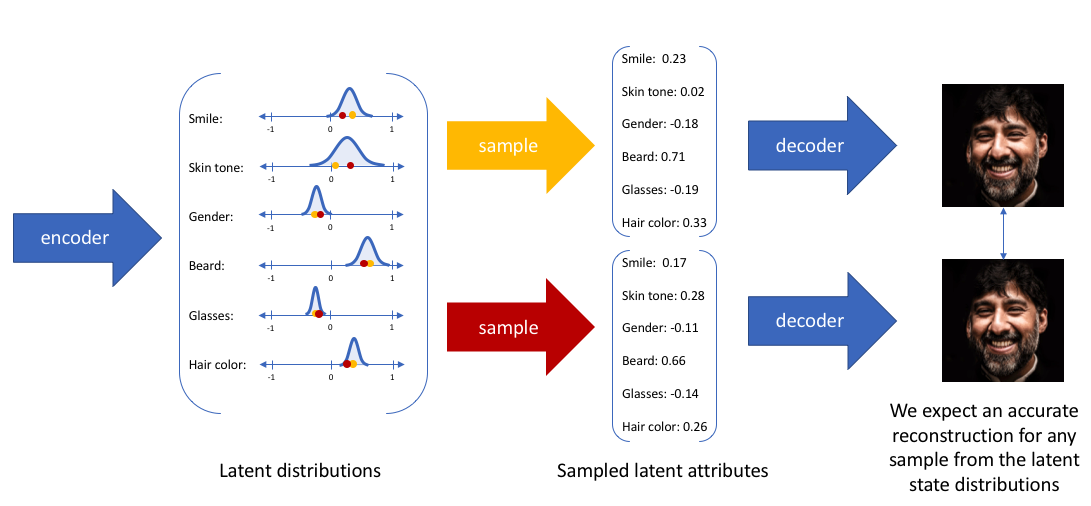
With this approach, we'll now represent each latent attribute for a given input as a probability distribution. When decoding from the latent state, we'll randomly sample from each latent state distribution to generate a vector as input for our decoder model.
Note: For variational autoencoders, the encoder model is sometimes referred to as the recognition model whereas the decoder model is sometimes referred to as the generative model.
By constructing our encoder model to output a range of possible values (a statistical distribution) from which we'll randomly sample to feed into our decoder model, we're essentially enforcing a continuous, smooth latent space representation. For any sampling of the latent distributions, we're expecting our decoder model to be able to accurately reconstruct the input. Thus, values which are nearby to one another in latent space should correspond with very similar reconstructions.
Statisical motivation
Suppose that there exists some hidden variable
We can only see
Unfortunately, computing
This usually turns out to be an intractable distribution. However, we can apply varitational inference to estimate this value.
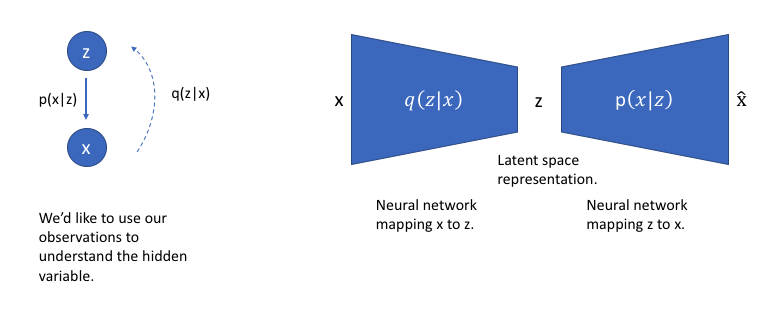
Let's approximate
Recall that the KL divergence is a measure of difference between two probability distributions. Thus, if we wanted to ensure that
Dr. Ali Ghodsi goes through a full derivation here, but the result gives us that we can minimize the above expression by maximizing the following:
The first term represents the reconstruction likelihood and the second term ensures that our learned distribution
To revisit our graphical model, we can use
Our loss function for this network will consist of two terms, one which penalizes reconstruction error (which can be thought of maximizing the reconstruction likelihood as discussed earlier) and a second term which encourages our learned distribution
Implementation
In the previous section, I established the statistical motivation for a variational autoencoder structure. In this section, I'll provide the practical implementation details for building such a model yourself.
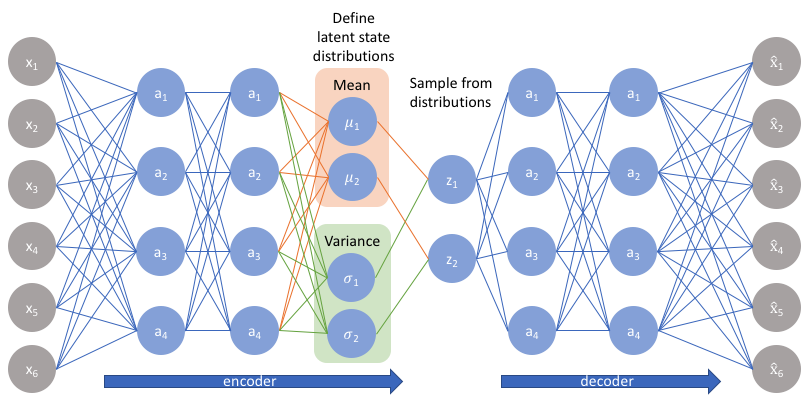
Rather than directly outputting values for the latent state as we would in a standard autoencoder, the encoder model of a VAE will output parameters describing a distribution for each dimension in the latent space. Since we're assuming that our prior follows a normal distribution, we'll output two vectors describing the mean and variance of the latent state distributions. If we were to build a true multivariate Gaussian model, we'd need to define a
Our decoder model will then generate a latent vector by sampling from these defined distributions and proceed to develop a reconstruction of the original input.
However, this sampling process requires some extra attention. When training the model, we need to be able to calculate the relationship of each parameter in the network with respect to the final output loss using a technique known as backpropagation. However, we simply cannot do this for a random sampling process. Fortunately, we can leverage a clever idea known as the "reparameterization trick" which suggests that we randomly sample
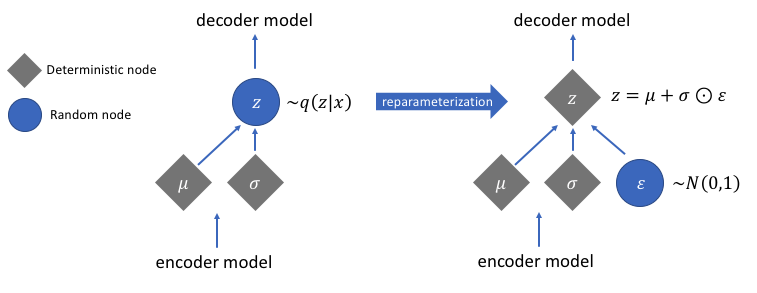
With this reparameterization, we can now optimize the parameters of the distribution while still maintaining the ability to randomly sample from that distribution.
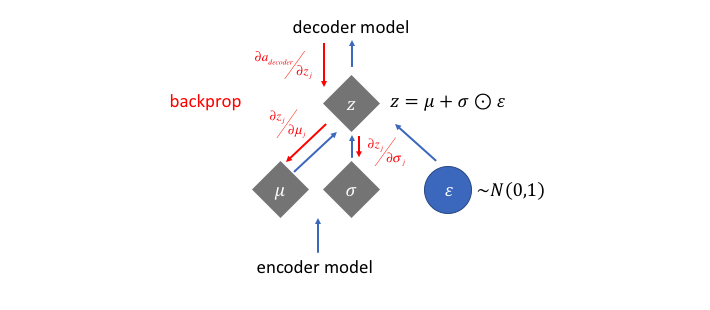
Note: In order to deal with the fact that the network may learn negative values for
Visualization of latent space
To understand the implications of a variational autoencoder model and how it differs from standard autoencoder architectures, it's useful to examine the latent space. This blog post introduces a great discussion on the topic, which I'll summarize in this section.
The main benefit of a variational autoencoder is that we're capable of learning smooth latent state representations of the input data. For standard autoencoders, we simply need to learn an encoding which allows us to reproduce the input. As you can see in the left-most figure, focusing only on reconstruction loss does allow us to separate out the classes (in this case, MNIST digits) which should allow our decoder model the ability to reproduce the original handwritten digit, but there's an uneven distribution of data within the latent space. In other words, there are areas in latent space which don't represent any of our observed data.
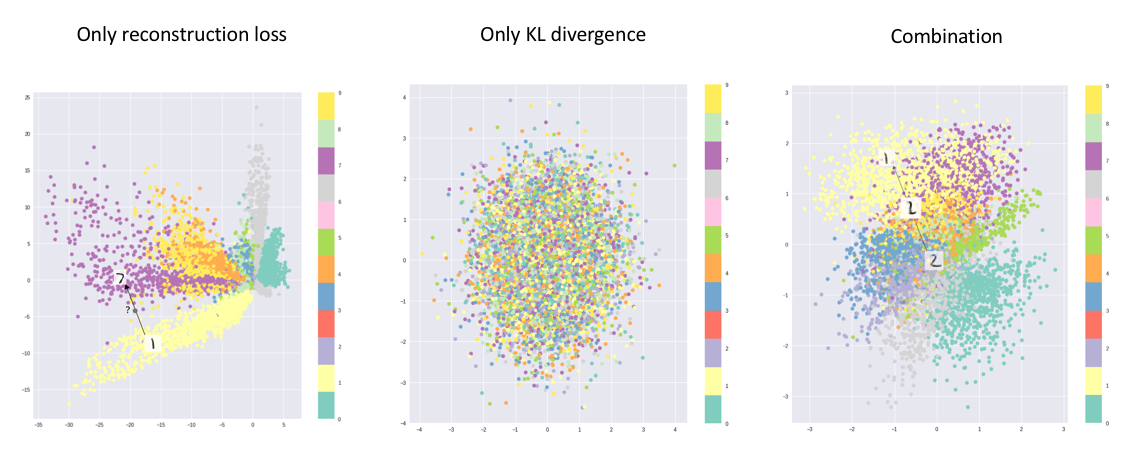
Image credit (modified)
On the flip side, if we only focus only on ensuring that the latent distribution is similar to the prior distribution (through our KL divergence loss term), we end up describing every observation using the same unit Gaussian, which we subsequently sample from to describe the latent dimensions visualized. This effectively treats every observation as having the same characteristics; in other words, we've failed to describe the original data.
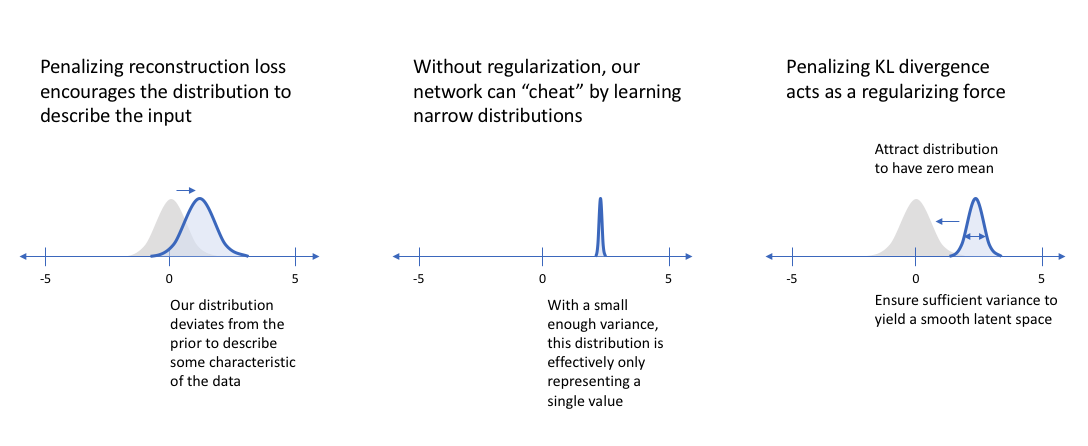
However, when the two terms are optimized simultaneously, we're encouraged to describe the latent state for an observation with distributions close to the prior but deviating when necessary to describe salient features of the input.
When I'm constructing a variational autoencoder, I like to inspect the latent dimensions for a few samples from the data to see the characteristics of the distribution. I encourage you to do the same.
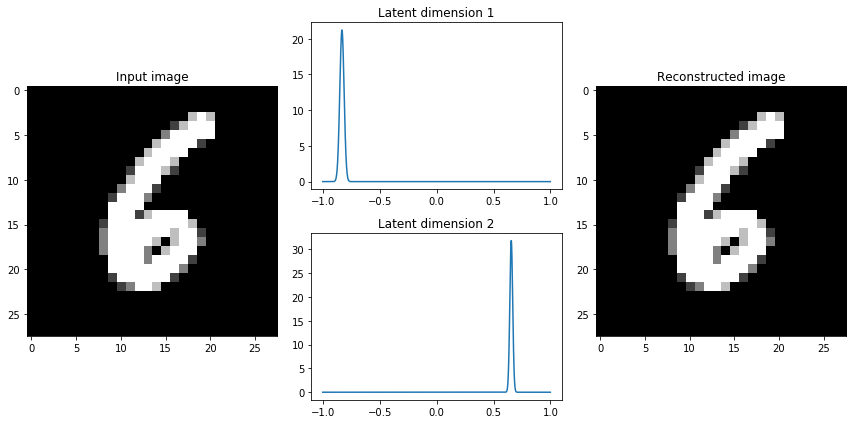
If we observe that the latent distributions appear to be very tight, we may decide to give higher weight to the KL divergence term with a parameter
Variational autoencoders as a generative model
By sampling from the latent space, we can use the decoder network to form a generative model capable of creating new data similar to what was observed during training. Specifically, we'll sample from the prior distribution
The figure below visualizes the data generated by the decoder network of a variational autoencoder trained on the MNIST handwritten digits dataset. Here, we've sampled a grid of values from a two-dimensional Gaussian and displayed the output of our decoder network.
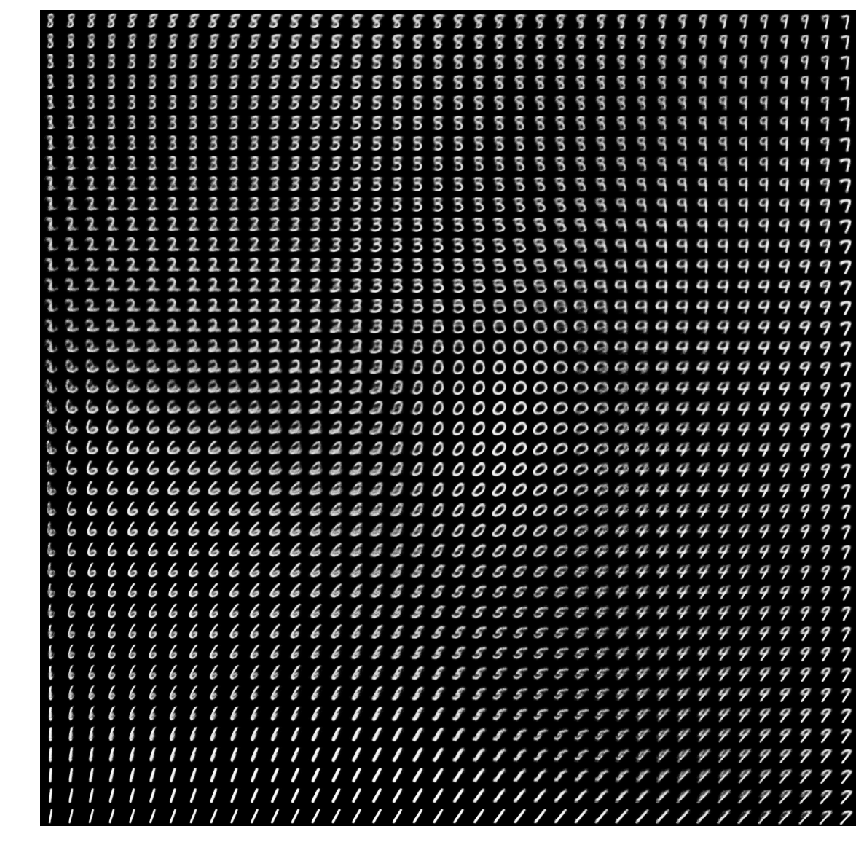
As you can see, the distinct digits each exist in different regions of the latent space and smoothly transform from one digit to another. This smooth transformation can be quite useful when you'd like to interpolate between two observations, such as this recent example where Google built a model for interpolating between two music samples.
Further reading
Lectures
- Ali Ghodsi: Deep Learning, Variational Autoencoder (Oct 12 2017)
- UC Berkley Deep Learning Decall Fall 2017 Day 6: Autoencoders and Representation Learning
- Stanford CS231n: Lecture on Variational Autoencoders
Blogs/videos
- Building Variational Auto-Encoders in TensorFlow (with great code examples)
- Building Autoencoders in Keras
- Variational Autoencoders - Arxiv Insights
- Intuitively Understanding Variational Autoencoders
- Density Estimation: A Neurotically In-Depth Look At Variational Autoencoders
- Pyro: Variational Autoencoders
- Under the Hood of the Variational Autoencoder
- With Great Power Comes Poor Latent Codes: Representation Learning in VAEs
- Kullback-Leibler Divergence Explained
- Neural Discrete Representation Learning
Papers/books
- Deep learning book (Chapter 20.10.3): Variational Autoencoders
- Variational Inference: A Review for Statisticians
- A tutorial on variational Bayesian inference
- Auto-Encoding Variational Bayes
- Tutorial on Variational Autoencoders
Papers on my reading list